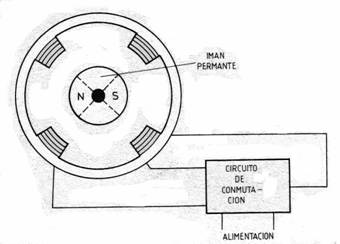
Los motores paso a paso ofrecen interesantes opciones para aplicaciones donde sea necesario controlar de manera exacta el movimiento o posicion. A diferencia de los motores DC comunes con este tipo de motores se puede establacer cuanto debe girar el eje sin recurrir a dispositivos como encoders, y de manera extremadamente precisa. Cada señal que se envia hace que el motor gire una cantidad determinada de grados (esta limitacion viene establecida por el diseño del motor pero por medio de la controladora puede ajustada hasta cierto punto) o pasos.
La velocidad de giro se establece con la frecuencia de los impulsos aplicados.
Las intrucciones de conexion se presentan para las controladoras A4983 y A4988.
Existen dos tipos basicos, los unipolares y los bipolares.
Los motores unipolares tiene dos devanados por fase lo que permite que el campo magnetico se invierta sin tener que invertir la direccion de la corriente en la bobina. Esto hace que estos tipos de motores sean mas faciles de controlar que los bipolares. El inconveniente es que solo la mitad de la fase lleva corriente en un momento dado, lo que disminuye el torque que puede generar el motor.
Aun asi con el modulo de control adecuado se puede paliar esta situacion utilizando los motores unipolares como bipolares (esto no es posible con los unipolares de 5 cables).
Motor bipolar estandar:
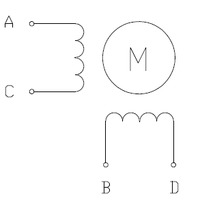
Los motores bipolares solo tienes una bobina por fase y requieren circuitos de control mas complicados (generalmente un puente H para cada fase).
Se distinguen por que tienen cuatro cables (dos por cada bobina).
Para el caso que nos ocupa (con el controlador A4983 o A4988) la manera de conectarlos seria el cable A del motor a la salida 1A de la placa, el cable C a las salida 1B, el cable B a la salida 2A y el cable D a la salida 2B.
Motor unipolar de dos fases:
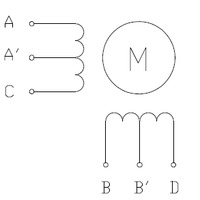
Este tipo de motores se distinguen por tener 6 cables.
Estos motores se pueden utilizar en las controladoras A4983 y A4988 utilizandolos como si de motores bipolares estandar se tratara, dejando los cables A’ y B’ del motor desconectados.
Motor unipolar de 8 cables:
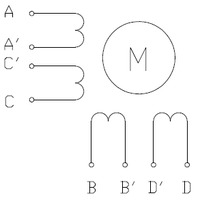
Como su propio nombre indica se distingue por contar con 8 cables para conectarlo.
Existen varias maneras de conectarlo. Un motor de este tipo tiene dos bobinas por fase y te da acceso a todos los cableados de las bobinas (en el caso de los motores unipolares de 6 cables A’ esta internamente conectado a C’ y el cable B’ a D’).
Al operar este motor como bipolar es posible usar dos cables por cada fase en paralelo o en serie. Al utilizarlo en paralelo disminuye la inductancia del cable lo que aumenta el rendimiento requiriendo mas corriente.
En el caso de las controladoras que nos ocupa estas limitan activamente la cantidad de corriente que entregan por fase por lo que solo podremos obtener la mitad de la corriente de fase que fluye a traves cada una de las bobinas paralelas.
Operarlo en serie seria como tener una sola bobina por fase (los casos anteriores). Esta es la configuracion recomendada con los controladores A4983 y A4988.
Para conectar el motor en paralelo los cables A y C se deben conectar a la salida 1A de la controladora, los cables A’ y C a la salida 1B, los cables B y D’ a la salida 2A y los cables B’ y D a la salida 2B
Para conectar el motor en serie se deben conectar entre ellos los cables A’ y C’ por un lado, y los cables B’ y D’ por otro. Despues los cables A, C, B y D se conectaran a la controladora como si de un motor bipolar estandar se tratara.
Buenas !!
Me podrian decir que tipo de cables usar para hacer las extenciones del motor hasta los drivers?